

Микросхема L298 представляет собой двойной полный мостовой драйвер, применяемый для управления двигателями постоянного тока и шаговыми двигателями. Благодаря наличию двух мостов микросхема может управлять двумя двигателями постоянного тока, причем независимо, или одним биполярным или униполярным шаговым двигателем.
При управлении двигателем постоянного тока микросхема может изменять направление тока в двигателе, реверсируя его или полностью отключать питание.
При управлении шаговыми двигателями возможно также управление направлением движения.
Однако эти функции не могут быть реализованы без управляющего устройства, подключаемого на вход микросхемы. Потому она и носит название – драйвер, то есть усилитель.
Чтобы понять как работает мостовой драйвер, рассмотрим упрощенную схему включения одной обмотки биполярного двигателя(аналогично включается двигатель постоянного тока), где ключевые элементы заменены выключателями.
В верхней части рисунка изображен мост со всеми выключателями, установленными в выключенное положение. В этом случае ток через обмотку отсутствует.
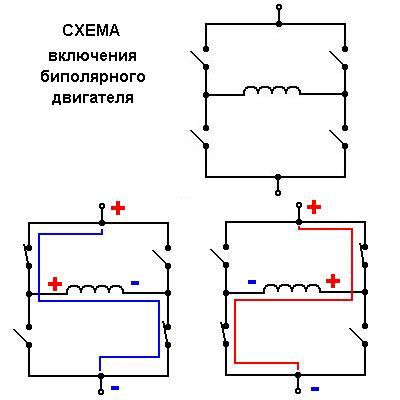
Внизу справа изображена ситуация, когда включен верхний левый и нижний правый выключатели. Синим цветом нарисован путь протекания тока.
В этом случае напряжение приложено к обмотке так, что плюс находится слева, а минус – справа. Предположим, что двигатель в этом случае вращается по часовой стрелке.
Если выключить эти ключи, а включить левый нижний и правый верхний, как на правом нижнем рисунке, напряжение к обмотке будет приложено в обратной полярности, то есть минус слева, плюс – справа. Путь протекания тока указан красным цветом. А поскольку изменилось направление тока, то и двигатель поменяет направление вращения и станет вращаться против часовой стрелки.
С шаговым двигателем ситуация аналогичная. Поскольку положение ротора шагового двигателя зависит не только от того, к какой обмотке приложено напряжение, но и от того, в какой полярности, в этих двух случаях ротор двигателя займет два разных положения. Чтобы понять, как это происходит, сравним ротор со стрелкой компаса и размешенным рядом со стрелкой электромагнитом:
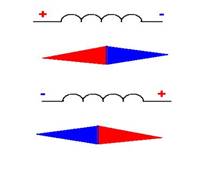
При изменении направления тока в обмотке стрелка также повернется в противоположное направление.
Возможно, у наблюдательного читателя возникнет вопрос: А что будет если замкнуть, например, оба правые или оба левые ключа? По идее должно быть короткое замыкание!
Но этого не происходит, потому что в микросхеме L298 ключами управляет специальная схема, исключающая такое катастрофическое стечение обстоятельств.
Настало время посмотреть на схему половинки L298.
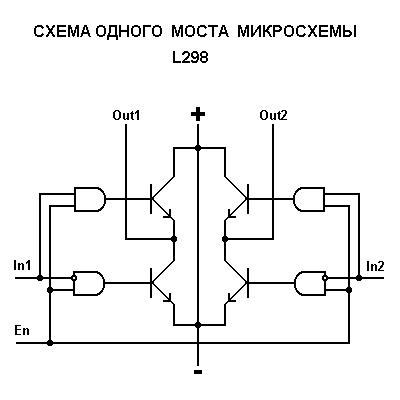
Вход «En» - это вход разрешения работы ключей. Для нормальной работы на этом входе должно присутствовать напряжение «лог 1», тогда логические элементы могут пропускать сигналы управления от входа к ключам.
Обратите внимание на логические элементы управляющие ключами. Несмотря на то, что левой или правой половиной ключа управление идет по одному входу, нижние схемы совпадения имеют инверсный вход, а верхние - прямой. Это приведет к тому, что если на вход управления In1 или In2 будет подано напряжение «лог 1», то откроются только верхние транзисторы ключей. И наоборот, если на входы будет подано напряжение «лог 0», то будут открыты только нижние транзисторы.
В обоих этих случаях ток через обмотку отсутствует и исключена ситуация, когда включены оба правые или оба левые транзисторы.
Для того, чтобы ток через обмотку появился, на выходах Out1 и Out2 должен быть разный потенциал. Это произойдет в том случае если справа открыт верхний, а слева – нижний транзисторы. Тогда на выходе Out 1 появится «плюс» , а на выходе Out 2 – «минус» источника питания. Но для этого надо подать на вход In1 напряжение «лог 1», а на вход In2 – напряжение «лог 0».
Для того, чтобы поменять направление тока в обмотке надо поменять уровни напряжения на входах, то есть подать на вход In1 напряжение «лог 0», а на вход In2 – напряжение «лог 1».
Для одного двигателя постоянного тока достаточно только одной половинки микросхемы, а для шагового двигателя необходимо использовать оба моста микросхемы, подключая обмотки биполярного двигателя каждую к своему мосту.
В случае с униполярными двигателями каждая из обмоток подключается к одной половинке моста. Рассмотрим на упрощенной схеме работу одной половинки микросхемы.
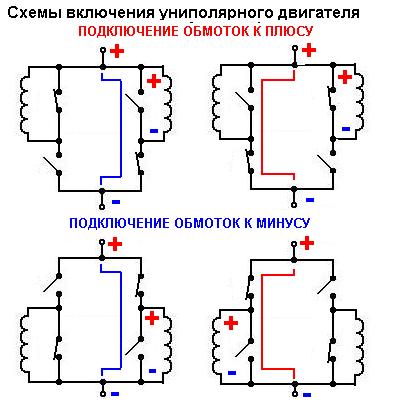
Обратите внимание, что на верхнем рисунке, то есть если общий вывод обмоток ШД подключается к «плюсу», включением обмоток управляют нижние ключи. Вернемся на схему L298 и увидим, что нижний ключ будет замкнут только в том случае если на вход In 1 или In2 подан уровень «лог 0», то есть для этой схемы активный уровень – низкий.
А вот для нижней схемы, где общие выводы обмоток подключаются к минусу, управляющими являются верхние ключи, а они замыкаются, если на входах In 1 или In2 действует высокий уровень, то есть напряжение «лог 1» . Это необходимо обязательно учитывать при разработке своих схем.
Теперь настало время посмотреть полную схему L298.
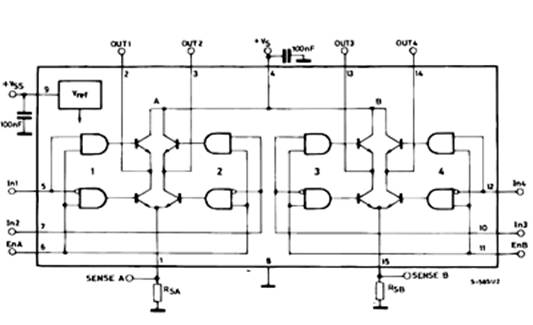
Как видим половинки полностью идентичны, логика управления описанная выше тоже одинакова для обоих мостов.
Как уже было сказано выше обмотки биполярного двигателя подключаются к правой и левой половинкам моста.
Рассмотрим логику управления микросхемой. Для управления двумя двигателями постоянного тока нужно просто подключить выводы первого к выходам Out1 и Out2 , а выводы второго двигателя к выводам Out3 и Out 4. Меняя уровни входных сигналов на входах In1 и In2, управляем первым двигателем, а изменяя уровни In3 и In4, управляем вторым двигателем.
Сложнее обстоит дело с шаговым двигателем. Рассмотрим для начала биполярный двигатель. Одну обмотку этого двигателя подключаем к выходам Out1 и Out2, а вторую к выходам Out3 и Out4. Напомню, что в простейшем случае обмотки двигателя расположены перпендикулярно. Для упрощения снова сравним ротор шагового двигателя с стрелкой компаса.
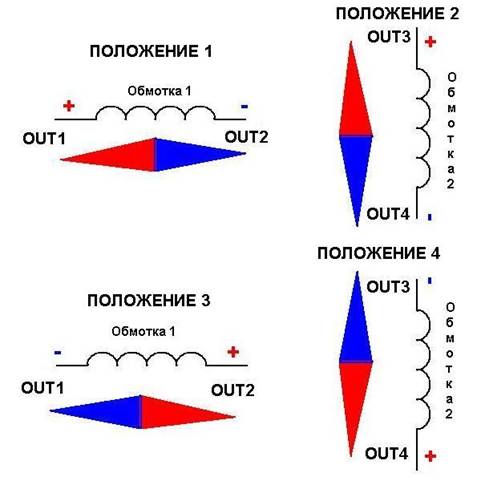
На рисунке изображены положения стрелки, которые она принимает при указанной полярности напряжения на выходах микросхемы L298.
А теперь основные правила для L298:
- Чтобы выход OUT-х был подключен к плюсу источника питания, на вход IN-х должна быть подана «Лог 1»
- Чтобы выход OUT-х был подключен к минусу питания, на вход IN-x должен быть подан «Лог 0».
- Чтобы обесточить обмотку, подключенную в выходам OUT-y OUT-z , на входах IN-y и IN-z должны присутствовать одинаковые уровни (или «Лог1» или «Лог0») Аналогично обесточить обмотку можно и установкой уровня «Лог 0» на входе EN, той половины микросхемы, к которой подключена эта обмотка.
Воспользовавшись этим правилом, составим таблицу входных уровней для 4-х положений стрелки:
|
Положение |
IN 1 |
IN 2 |
IN 3 |
IN 4 |
|
1 |
1 |
0 |
1 или 0 |
Также как OUT3 |
|
2 |
1 или 0 |
Также как OUT1 |
1 |
0 |
|
3 |
0 |
1 |
1 или 0 |
Также как OUT3 |
|
4 |
1 или 0 |
Также как OUT1 |
0 |
1 |
Теперь обратите внимание на последовательность положений. Стрелка как бы вращается по часовой стрелке. Точно так же будет вращаться и ротор шагового двигателя. Чтобы ротор вращался непрерывно, нужно после того, как он займет 4-е положение, снова подать на входы микросхемы уровни, соответствующие 1-му положению, затем 2-му, затем 3-му и т.д..
Если вам необходимо изменить направление вращения, например с положения 3, то следующим шагом, т.е. следующей комбинацией напряжений на входах должна быть комбинация, соответствующая положению с номером 2, затем 1, затем 4 и т.д.
Эти комбинации соответствуют так называемому ПОЛНОШАГОВОМУ режиму.
ПОЛУШАГОВЫЙ режим характеризуется тем, что в промежутках между полными шагами питание подается сразу на две обмотки, т.е. обмотку с предыдущим положением и обмотку со следующим положением. Это приводит к тому, что ротор под воздействием электромагнитных сил двух обмоток займет некое среднее между шагами положение. Если токи в обмотках строго равны, то это положение будет ровно посредине между предыдущим и последующим.
Составим таблицу для полушагового режима.
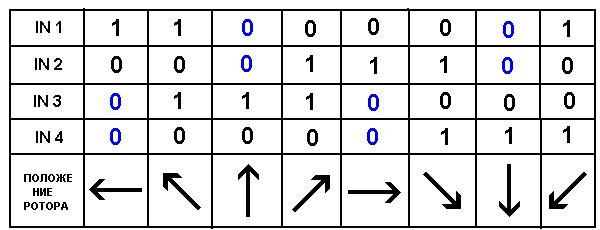
Синим цветом обозначены входы, которые в данный момент отключают «свою» обмотку. Это аналогично установке уровня «Лог 0» на соответствующем входе «ЕN»
Для униполярного двигателя правила распределения входных уровней такие же как и в случае подключения биполярного.
Исходя из этого можно сделать вывод, что последняя таблица будет соответствовать подключению униполярного двигателя в том случае, если общие выводы обмоток подключены к минусовому проводу.
Если необходимо подключить общий вывод обмоток униполярного двигателя к плюсовому проводу, то в таблице нужно просто заменить нули на единицы и наоборот, за исключением обозначенных синим цветом.
Смена направления вращения производится так же как и в случае с полношаговым режимом.
Подключение драйвера к микросхеме ТМ7 в контроллере VRI-CNC.
Обеспечивает полношаговый и полушаговый режимы. Для подключения униполярного двигателя необходимо общие выводы обмоток соединить с корпусом, а другие выводы обмоток подключать к выводам 2,3,13,14 микросхемы L298,
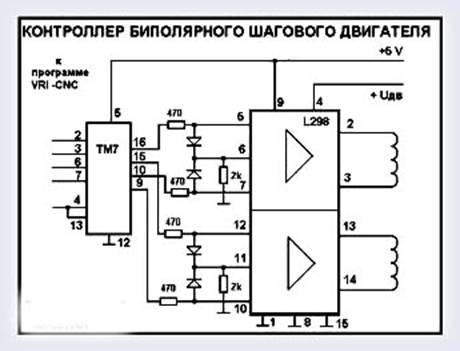
При условии правильного выполнения монтажа схема в наладке не нуждается.
Подключение ТМ7 к LPT порту осуществляется как обычно для контроллера VRI-CNC.
Резисторы в схеме должны быть мощностью не менее 0,125 Ватт, диоды - любые маломощные низкочастотные.
Для увеличения скорости вращения шаговых двигателей рекомендуется включить последовательно с обмотками резисторы, величина сопротивления и мощность которых рассчитываются, как указано в статье о разгоне двигателей.
ХАРАКТЕРИСТИКИ ДРАЙВЕРА L298
| Напряжение питания двигателей | до 50 V |
| Напряжение питания микросхемы | 7 V |
| Максимальный пиковый ток ключей (t<100мксек) | 3 А |
| Средний(постоянный) ток ключей | 2 А |
| Потребляемый микросхемой ток не более | 70 мА |
| Рассеиваемая мощность | 25 Ватт |
| Входной уровень «Лог 0» менее | 1,5 V |
| Входной уровень «Лог 1» более | 2,3 V |
| Падение напряжения на ключах при токе 1 А | не более 1,7 В |
| Падение напряжения на ключах при токе 2 А | не более 2,7 В |