

Н.Филенко
Зачем это нужно?
В хоббийных (любительских) конструкциях станков с ЧПУ и различных устройств автоматики, где основным исполнительным элементом является шаговый двигатель, очень популярны простейшие схемы коммутации обмоток шаговых двигателей. Чаще всего они представляют собой связку из генератора последовательности импульсов, в качестве которого может выступать LPT порт компьютера и соответствующая программа, а также драйвера (усилителя), в качестве которого используются полевые или биполярные транзисторы и транзисторные сборки. Схемы очень просты и доступны для повторения даже начинающим электронщикам. Но вместе с простотой они таят в себе одну неприятность, с которой рано или поздно сталкиваются все – малые скорости вращения шагового двигателя, только изредка достигающие 4-5 оборотов в секунду. Для станков с ЧПУ, где подача выполнена по схеме гайка-винт, этого оказывается недостаточно, поскольку соответствует максимальной скорости перемещения не более 10 мм/сек и то в лучшем случае.
Почему так происходит? Все дело в скорости нарастания тока на индуктивности обмоток.
В соответствии с правилом Ленца при включении в цепь постоянного тока индуктивности, в ней возникает ЭДС самоиндукции, которая препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи.
Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте.
Взгляните на диаграмму:
На малых скоростях вращения ток в обмотке двигателя после подачи на него импульса напряжения успевает достичь своего номинального значения и момент двигателя практически соответствует паспортному значению.
Диаграмма нарастания тока обмотки в ШД
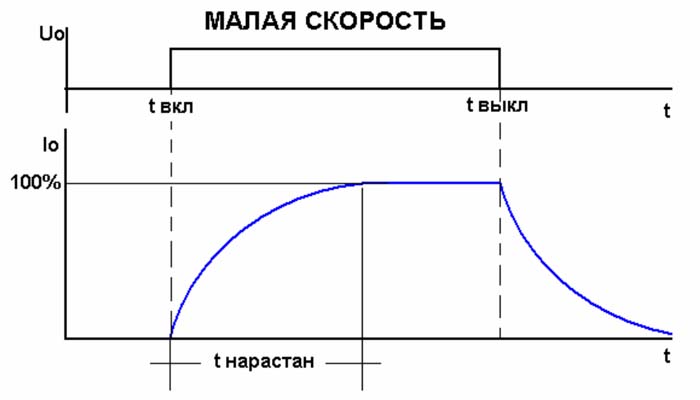

Но при попытке увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается.
Происходит снижение крутящего момента, двигатель начинает пропускать шаги и в конечном счете просто останавливается.
Как же с этим бороться?
Очевидно, нужно попытаться увеличить скорость нарастания тока в обмотке шагового двигателя, чтобы ток успевал достичь своего максимума даже на больших скоростях.
Для этого необходимо хотя бы «краем глаза» заглянуть в теорию.
Рассмотрим эквивалентную схему обмотки двигателя.

Эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление.
В соответствии с законом изменения силы тока в цепи постоянного тока, скорость нарастания тока в обмотке прямо пропорциональна приложенному к ней напряжению, а так же соотношению R/L(омического сопротивления к величине индуктивности)
Т.е. чем больше приложенное напряжение, тем быстрее вырастает ток.
И в свою очередь, чем больше соотношение R/L, тем также быстрее растет ток.
Вывод: Для ускорения двигателя надо или повышать напряжение или соотношение R/L.
Рассмотрим каждый из вариантов ускорения.
Начнем с соотношения R/L. Конструкция двигателя нами не может быть изменена, т.е. ни величину L, ни величину R мы изменить не можем. Но оказывается, можно увеличить эквивалентную величину R последовательным включением с обмоткой двигателя дополнительного резистора Rд

Несмотря на то что резистор не является конструктивным элементом двигателя, он приводит к увеличению отношения и это отношение принимает вид (R+Rд)/L.
То есть увеличивая величину Rд мы фактически ускоряем двигатель.
Но! Увеличение Rд приводит к снижению тока в обмотке двигателя, т.е потере момента.
Что делать? Выход один – увеличивать приложенное напряжение до тех пор, пока ток через обмотку не станет номинальным.
И тут проявляется один очень неприятный недостаток такой схемы – увеличение приложенного к схеме напряжения и возрастание тока через Rд приводит к увеличению выделяемой на нем мощности, т.е. к нагреву добавочного резистора. Эти резисторы должны быть способны рассеивать достаточную мощность, 10 и более ватт в зависимости от мощности двигателя и увеличения напряжения.
Попробуем рассчитать резистор и рассеиваемую на нем мощность.
Допустим, ваш двигатель имеет омическое сопротивление 1 Ом и номинальный ток обмотки 2 А. Без добавочного резистора вы должны были бы питать двигатель напряжением 2 Вольта. Вы решили увеличить напряжение в 10 раз, т.е. до 20 вольт. Чтобы получить ток 2 А, общее сопротивление (R+Rд) должно быть равным (R+Rд)= U/I, т.е. 10 Ом.
Поскольку обмотка двигателя имеет сопротивление 1 Ом, то добавочное сопротивление должно быть равно 9 ом.
Определим выделяемую на нем мощность P=I^2*Rд=I*I*Rд=36 Ватт.
Очевидно, для надежной работы такой резистор должен рассеивать мощность не менее 40-50 ватт. Это очень большие резисторы, и очень большие потери мощности, поэтому такая схема применяется только для маломощных двигателей.
Рассмотрим второй вариант разгона:
Для этого нужно повысить напряжение, приложенное к обмотке двигателя.
Но! Безконтрольное повышение напряжения при простейшей коммутации приведет к возрастанию тока на омическом сопротивлении и следовательно к чрезмерному нагреву обмоток и двигателя в целом.
Какой выход?
Выход в применении схем стабилизации или контроля тока через обмотку двигателя.
Например, схем с ключевым (широтно - импульсным управлением), так называемые
Схемы ШИМ.
Разновидностью такой схемы является схема, примененная в драйверах шаговых двигателей SMA7020(7022, 7024, 7026, SLA7029)
Принцип работы:
Схема состоит из ключевого транзистора и петли регулирования тока в которую входит измерительный резистор Rs и компаратор.
При включении питания и отсутствии тока через обмотку двигателя компаратор включает ключевой элемент (транзистор), через который начинает течь ток обмотки шагового двигателя. Благодаря индуктивности обмотки, ток в обмотке возрастает не мгновенно, а по экспоненте, что дает возможность контролировать его и разомкнуть цепь тока в нужный момент, ограничив тем самым ток обмотки. Как это происходит?
По мере роста тока возрастает напряжение на измерительном резисторе Rs. Когда это напряжение достигнет напряжения Vref, компаратор переключиться и выключит ключевой транзистор. Ток в обмотке начнет уменьшаться. Напряжение на резисторе Rs также уменьшается и до уровня обратного срабатывания компаратора. Компаратор снова переключится и включит ключевой транзистор. Ток в обмотке снова начнет расти. Процесс циклически повторяется до момента снятия напряжения питания.
Изменение тока в обмотке зависит от величины резистора Rs, гистерезиса компаратора и наличия интегрирующих и дифференципрующих цепочек в петле обратной связи.

Изменяя напряжение Vref можно регулировать ток через обмотку двигателя.
В данной схеме обеспечивается постоянство амплитуды пульсаций, но частота пульсаций зависит от напряжения питания и индуктивности обмотки.
Недостатком схемы является сложность синхронизации работы при необходимости одновременной стабилизации двух обмоток двигателя.
Поэтому применяется схема в основном для питания маломощных двигателей.
Другая разновидность схемы используется в большинстве современных блоков управления.
Ее особенность – постоянная частота переключения и малый уровень пульсаций, который обычно не превышает 10%.
Принцип работы.

Генератор фиксированной частоты вырабатывает импульсы, устанавливающие триггер в состояние, открывающее выходной транзистор. Ток в обмотке двигателя начинает возрастать, вследствие чего, на измерительном резисторе Rs, включенном в цепь двигателя, возрастает напряжение. Как только напряжение достигнет напряжения Uref, компаратор переключится и сбросит триггер в исходное состояние. В результате ключ выключается и ток в обмотке двигателя начинает спадать. Частота тактового генератора подобрана таким образом, чтобы спад не был сильно глубоким и следующий импульс поступает не позже, чем ток снизится на 5-10%.
Новый импульс с генератора включит выходной транзистор и ток обмотки снова начинает возрастать. Процесс повторяется периодически.
Повышение питающего напряжения вызывает только увеличение скорости нарастания тока (ускорение двигателя), но пиковый ток в обмотке двигателя контролируется цепью обратной связи и остается постоянным. Постоянной остается и частота переключений, которую обычно выбирают за пределом слышимости (более 20 кГц).
Такая схема применяется в большинстве современных контроллеров и драйверов управления шаговыми двигателями, как очень эффективная.
Благодаря наличию входа управления током двигателя –Vref, в этих схемах возможна реализация микрошагового управления или многоуровневого (плавного или ступенчатого) регулирования тока, например снижение величины тока в режиме удержания или еще большее снижение тока в «режиме сна».
Сравнение схем управления.
На временной диаграмме показано нарастание тока в обмотке ШД для разных схем. Из диаграммы становится ясно, что
 <
<
оптимальным вариантом по быстродействию является именно ключевая стабилизация тока.
Переделывать ли простейший контроллер?
Нет, не нужно, можно дополнить его простой схемой ключевой стабилизации тока обмотки.

Схема подключается к уже действующему контроллеру всего 2-мя проводами:
1- корпус.
2 - провод идущий от коллектора ключевого транзистора подключается к эмиттерам транзисторов одного канала, которые отсоединяются от корпуса.
Аналогичным образом соединяется и первый вариант схемы ключевой стабилизации, например на драйвере шагового двигателя SLA7026.
К сожалению, данная схема эффективна только в полношаговом режиме.
В режиме полушага в некоторые моменты включены параллельно две обмотки шагового двигателя. А ток ограничивается как бы для одной. В результате ток в каждой обмотке в 2 раза меньше, чем если бы была запитана только одна обмотка. Результирующий же ток ( и момент двигателя) в момент одновременной работы двух обмоток падают до 0, 7 от номинального.
Выход из ситуации в двухканальном стабилизаторе тока, каждый из каналов которого контролирует свою пару обмоток. В результате в полушаговом режиме при включении одновременно двух обмоток результирующий момент увеличивается до 1,4 от номинального.
Но в этом случае желательно принять меры к синхронизации каналов стабилизации для уменьшения взаимных помех и точно подобрать резисторы Rs, в обеих каналах они должны быть одинаковы. Как уже было сказано, использование первого типа широтно импульсного регулирования(SLA7026) в двухканальном варианте затруднительно.

В целях упрощения конструкции можно использовать внешний генератор например на таймере К1006ВИ(NE555) или MC1455, синхронизирующий работу сразу всех каналов контроллера.
Практическая реализация стабилизаторов тока.
Схема 1.
Реализована на драйверах шаговых двигателей SLA7026, но может быть использованы аналогичные микросхемы SLA7022, SLA7024, SMA7029.
каждая микросхема используется для стабилизации тока двух двигателей или как двухканальная для одного маломощного двигателя.
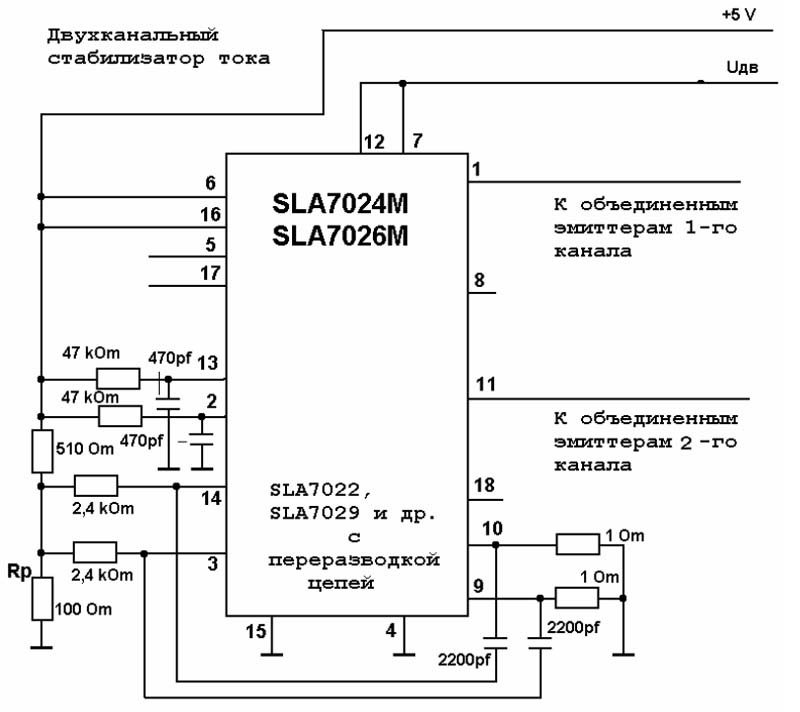
Схема включения - типовая для примененных драйверов.
Резисторы подключенные к выводам 9 и 10 – измерительные, они определяют пиковый ток через обмотки двигателей, который должен быть не выше 2 А для драйвера SLA7026 и не выше 1 А для других типов драйверов.
Регулировка тока в обоих каналах одновременно возможна изменением резистора Rp.
Схема 2.
Основу доработки составляет широко распространенная, недорогая, специализированная микросхема для импульсных источников питания UC3842. Существует несколько разновидностей этой микросхемы, выпускаемых под разными брэндами:
Unitrode,Unitra,Solitron,Philips,Semiconductors. Аналоги микросхемы KA3842,DBL3842,SG3842,TL3842,KIA3842,GL3842, и др. Ввиду массовости применения, стоимость этих микросхем очень низка.
Принцип работы:
Напряжение питания 16-36 вольт подается на вывод 7 микросхемы.
Компараторы в цепи питания включают встроенный стабилизатор опорного напряжения и разрешают прохождение сигналов управления к выходным транзисторам. Генератор(Oscillator) формирует импульсы высокой частоты (20 и более кГц), первый из которых устанавливает триггер в открытое состояние. Сигнал с выхода триггера через логический элемент включает выходной драйвер. Напряжение с драйвера открывает выходной транзистор, включенный в цепь обмоток шаговых двигателей и ток в обмотке начинает возрастать. На резисторе Rs начинает возрастать напряжение, которое пропорционально току в обмотке. Как только напряжение достигнет величины 1 Вольт, компаратор контроля тока (Current sense comparator) переключит триггер в исходное состояние, что приведет к выключению выходного ключа. По мере поступления следующего импульса с генератора Триггер вновь переключится, ключ открывается и ток через обмотку снова начинает возрастать. Процесс повторяется. Для упрощения схемы не используется часть схемы, обеспечивающая (в блоках питания) обратную связь по напряжению, но и стабилизатора тока нам вполне достаточно.

Печатная плата данной схемы от VVChaif в формате SprintLayout
обсуждение этой платы в форуме
Частота тактового генератора задается резистором подключенным к выводам 4 и 8, а также конденсатором, подключенным к выводу 4.
Ориентировочно величины конденсатора и резистора можно определить по таблице:

Для регулировки частоты вместо постоянного резистора, подключенного вк выводам 4 и 8, можно применить два резистора, переменный и постоянный по 22-24 кОм каждый, соединенные последовательно.
В случае применения внешнего генератора, синхронизирующего работу двух и более каналов, частотозадающие резистор и конденсатор не устанавливаются, а выводы 4 микросхем подключаются к выходу внешнего генератора.
Как уже упоминалось, петля обратной связи по напряжению в данной схеме не используется, и на вход Vref (вывод 2) подается постоянное напряжение.
Переменным резистором устанавливают напряжение на выводе 1 более 3,5 вольт. В этом случае на инверсном входе компаратора контроля тока установится стабильное напряжение 1B. Таким образом компаратор контроля тока будет переключаться и выключать выходной ключ при напряжении 1 вольт на входе 3, т.е на измерительном резисторе Rs.
Величина Rs расчетная, она определяет пиковый ток в обмотке двигателя.
Сопротивление определяется по простой формуле R=1/Iобм.ном
Для тока 1 А резистор должен быть 1 Ом, для тока 2 А – 0,5 Ом, для тока 4 А – 0,25 Ом.
Напряжение питания двигателей можно увеличить до 40 и более вольт.
Вместо полевого транзистора можно применить «дарлингтоны» КТ829 или КТ972, при применении других транзисторов необходимо подобрать резисторы в базовой цепи.

При необходимости можно использовать напряжение +5 В на выводе 8 микросхемы UC3842 для питания микросхемы ТМ5(ТМ7) и синхронизирующего генератора, если таковые есть.
Если напряжение питания двигателей находится в пределах 16-36 вольт, микросхему UC3842 можно также питать этим напряжением.
При большем напряжении питания двигателей необходимо использовать добавочный резистор, включенный последовательно с выводом 7 микросхемы.
Величина резистора - 10 Ом на каждый вольт избыточного напряжения.
В этом случае вывод 7 соединяется с корпусом через конденсатор 200-500 мкф на напряжение 50 Вольт. Рекомендуется также установить дополнительный стабилитрон между выводом 7 и корпусом. Напряжение стабилизации – 30- 36 Вольт, ток стабилизации не менее 100 мА.
При напряжении питания менее 16 вольт микросхема UC3842 работать не будет.
Данную схему можно использовать с очень большими токами двигателей.
Необходимо только следить, чтобы ток не превысил допустимого значения для обмотки, ключей контроллера и выходного ключа стабилизатора тока.
В целях максимального использования скоростных возможностей двигателя рекомендуется для каждого типа двигателя подобрать частоту импульсов, напряжение питания (оно определит скорость нарастания тока) и оптимальный пиковый ток.